




April 7, 2026

Noemie Ifrah, Marketing & Communications Manager, Orca AI
Share




Maritime navigation has long been built on a quiet assumption: that satellite positioning can be trusted. That assumption is now under sustained pressure.
During Orca AI’s recent webinar GPS Under Attack: Preparing for a World of Unreliable Navigation Signals, the discussion moved quickly from theory to operational reality. Moderated by Edwin Lampert, Executive Editor at Riviera, the session brought together Panagiotis Anastasiou (Cyber Security Strategy Leader, Bureau Veritas), Panos Kourkountis (Technical Director, SeaTraders SA), and Yarden Gross (CEO and Co-founder, Orca AI).
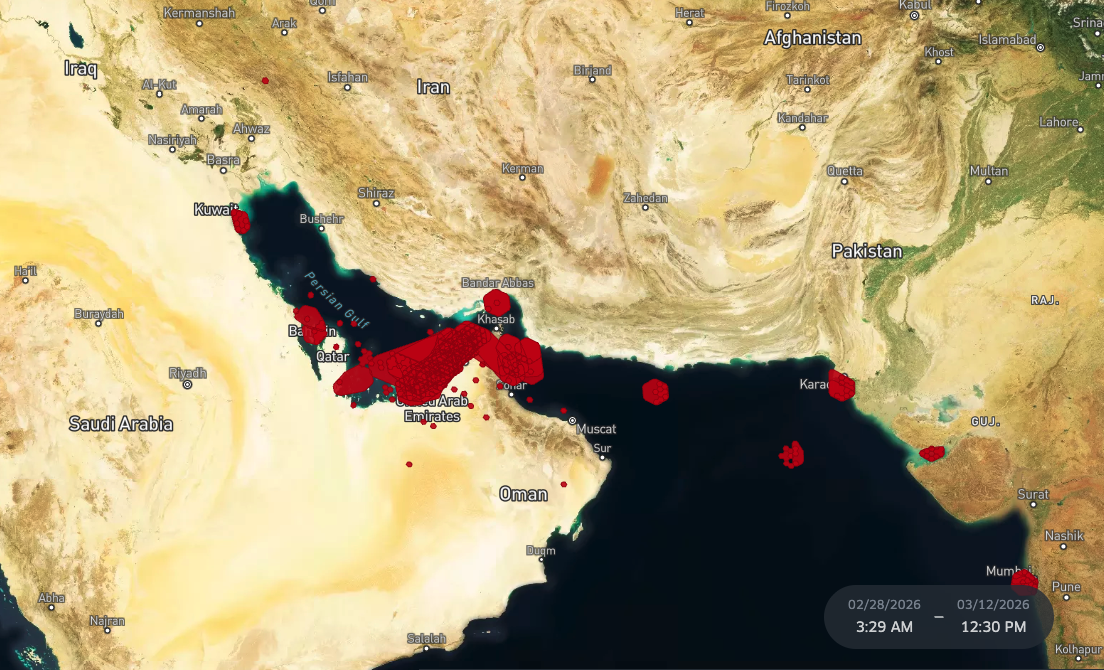
Set against a sharp escalation in GNSS disruption – including more than 1,100 vessels affected within a single 24-hour period in the Persian Gulf earlier in March – the conversation focused on a simple but urgent question: how can operators maintain safe navigation when the signals they rely on can no longer be assumed to be reliable?
A threat that is no longer theoretical
Across the panel, there was clear alignment that GNSS interference is not a future risk – it is already widespread and increasing.
From a class perspective, Anastasiou pointed to a growing body of incident data and industry reporting that shows disruption is both frequent and geographically expanding. Mariners themselves are reporting that the situation is not improving, with interference now a recurring operational condition rather than an exception.
Gross reinforced this with fleet-level visibility. Drawing on data from vessels already experiencing disruption, he noted that spoofing and jamming events have increased sharply in recent months and are unlikely to be temporary. Instead, they represent a new baseline of operational complexity.
For operators, the implication is straightforward: GNSS unreliability is no longer an edge case. It is a condition that must be actively managed.
Regulation is moving – but not fast enough
The webinar took place shortly after an extraordinary IMO council session, which reinterpreted SOLAS requirements to emphasise resilient positioning, navigation and timing (PNT) systems.
Anastasiou described the practical takeaway for operators as a shift towards multi-sensor navigation. Rather than relying on a single input, vessels must combine multiple data sources and ensure integrity monitoring is in place.
But there was also realism about the limits of regulation.
Recent incidents – including the container ship Source Blessing, which was both subject to GNSS interference and struck by a projectile off Jebel Ali in the UAE – highlight a more complex threat landscape where electronic and kinetic risks can occur simultaneously. Current regulatory frameworks, the panel agreed, do not fully address this convergence.
Gross framed it more broadly: regulation is moving in the right direction, but cannot keep pace with the speed at which risks are evolving. As a result, operational playbooks and onboard decision-making remain critical.
What crews actually experience
One of the most practical parts of the discussion centred on what GNSS disruption looks like on the bridge.
In some cases, spoofing is obvious – vessels appear on land or move at impossible speeds. These scenarios are relatively easy to detect and trigger established cross-check procedures.
More challenging are subtle deviations, where position data shifts slightly but remains plausible. As Gross noted, these are more dangerous because they can influence decision-making without being immediately recognised.
Kourkountis added that, in more severe cases, crews may lose positioning data entirely, forcing a return to traditional navigation methods (compass and sextant). While these tools remain onboard, he was candid about their limitations: many crews are no longer sufficiently practiced to adequately rely on them under pressure.
The result is a growing gap between theoretical fallback capability and practical readiness.
From reactive to proactive operations
A clear shift emerging from the discussion is the move from reactive to proactive risk management.
With better data and visibility, some operators are beginning to anticipate disruption rather than respond to it. Gross highlighted how real-time intelligence can identify high-risk areas, allowing vessels to prepare in advance – adjusting watchkeeping, reinforcing procedures and increasing situational awareness before entering affected zones.
This proactive approach materially reduces risk. As several panellists noted, managing disruption is far easier when it is expected than when it comes as a surprise – particularly in complex or high-traffic environments.
The role of shore-based support
The session also pointed to a gradual evolution in the relationship between ship and shore.
Anastasiou emphasised the importance of governance – clear roles, responsibilities and communication structures when incidents occur. With improved connectivity, shore-based operations centres can now monitor vessels in near real time, providing an external reference point and helping identify anomalies such as sudden positional “jumps”.
This creates a form of distributed situational awareness, where ship and shore work together to validate data and support decision-making.
However, this requires more than technology. It depends on structured procedures and a shared understanding of how to respond – something still uneven across the industry.
Technology is part of the answer – but not the whole
The panel discussed a range of emerging solutions, from authenticated navigation messages such as Galileo OSNMA (Open Service Navigation Message Authentication) to interference detection systems like JASP-R, as well as alternative positioning technologies including Iridium-based LEO systems.
While progress is clear, no single solution currently provides a complete answer. Each addresses part of the problem – whether spoofing detection, signal authentication or backup positioning – but gaps remain.
As a result, resilience is being built through layering: combining multiple technologies, cross-checking inputs and maintaining redundancy across systems.
Gross also pointed to the role of AI-driven situational awareness as an additional layer – particularly in providing visibility and alerting independent of GNSS inputs.
Key takeaways of the session included:
- Several themes emerged consistently across the discussion:
- GNSS disruption is now a persistent, real-world operational challenge
- Regulatory frameworks are evolving, but lag behind the pace of risk
- Subtle spoofing events pose the greatest danger due to delayed detection
- Traditional navigation methods remain important, but practical proficiency is declining
- Proactive risk management – enabled by data – is becoming a key differentiator
- Shore-based support is increasing, but depends on clear governance and connectivity
- No single technology solves the problem; resilience comes from layered systems
Ultimately, the webinar made one point clear: the foundations of navigation are shifting.
Positioning data can no longer be taken at face value. Instead, safe navigation increasingly depends on verification, redundancy and judgment – supported by technology, but not replaced by it.


