April 29, 2026

Noemie Ifrah, Marketing & Communications Manager, Orca AI
Share




Key takeaways
- GNSS disruption does not remove data, it breaks alignment between systems. Position, timing, and AIS inputs remain available, but no longer match closely enough to be used without validation
- Navigation shifts from reading the situation to verifying it. Crews spend more time cross-checking radar, AIS, and visual inputs, and less time acting on a single source of information
- Operational risk builds through workload, not system failure. Slower decision-making, continuous verification, and limited task-sharing increase cognitive load over the course of a watch
- Low visibility removes the last reliable fallback. When GNSS and AIS are degraded, physical observation becomes the primary check on instrument data — but in fog, night, or poor weather, that option is itself constrained, compounding risk precisely when it matters most.
- Resilience requires an independent reference point. Orca AI adds a visual layer based on physical detection, supporting continued target detection and prioritization even when GNSS or AIS is unreliable, and reducing the time spent resolving conflicting inputs.
For over three decades, maritime navigation has been defined by a steady march toward digital integration. The bridge of a modern vessel is a marvel of connectivity, where Global Navigation Satellite Systems (GNSS), Automatic Identification Systems (AIS), Radar/ARPA, and ECDIS are now tightly interconnected, forming the backbone of situational awareness on the modern bridge. This digitalisation has delivered efficiency and precision, enabling smaller bridge teams to manage increasingly complex operating environments with fewer manual processes and tighter margins.
That model is now being tested in ways the industry did not previously have to account for.
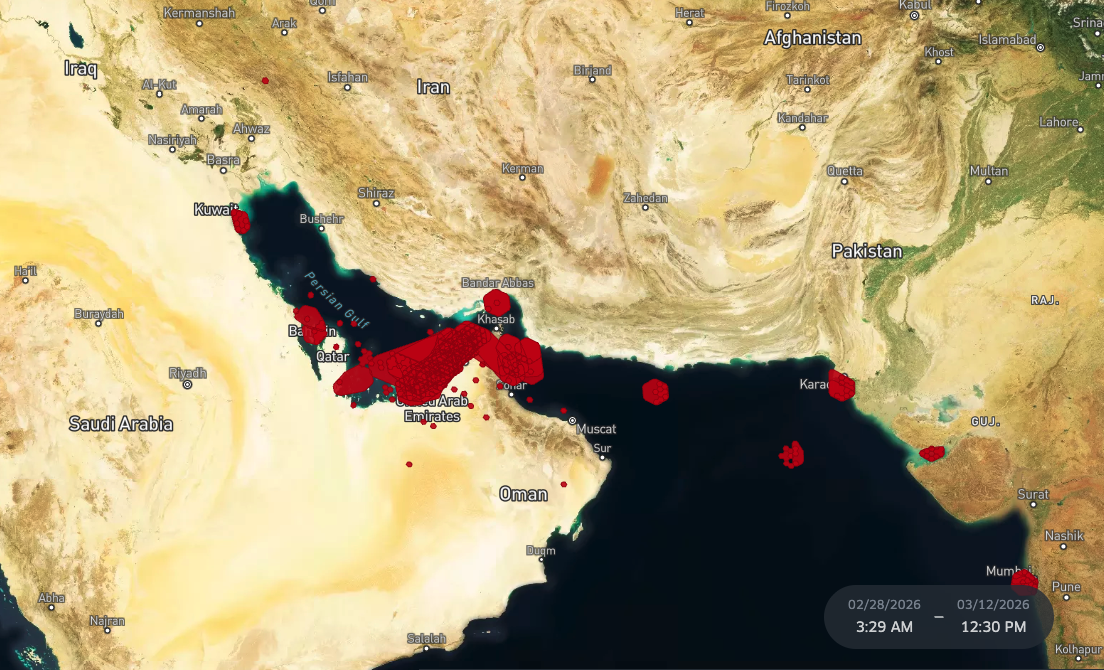
Recent escalation involving Iran has exposed the vulnerability of satellite-based navigation in the Strait of Hormuz, one of the world’s most critical shipping corridors. Alongside missile strikes and direct threats to vessels, maritime operators are also dealing with widespread GPS spoofing affecting commercial shipping routes.
Vessels transiting the region have reported position data that is clearly impossible in operational terms — ships appearing miles inland, drifting erratically across charts, or jumping between locations without any corresponding change in course or speed, often visible directly in GPS ship tracking systems and consistent with large-scale GPS location spoofing.
The issue here isn’t that the navigation fails, but that GNSS can no longer be treated as a primary reference. It becomes one input among several, requiring continuous verification alongside radar, AIS, and visual observation.
The limits of GNSS navigation are now operationally visible
The Persian Gulf and Strait of Hormuz currently represent the most concentrated example of GNSS disruption affecting commercial shipping. Following the recent escalation involving Iran, interference has impacted more than 1,650 vessels operating in the region. In these conditions, disruption does not affect a single signal, but the wider global navigation system, with consequences across positioning, timing, and traffic awareness.
What makes this environment particularly challenging is the lack of a single, identifiable source. Interference may originate from shore-based systems, but also from vessels operating within the same traffic lanes, including those engaged in shadow fleet activity. This removes a key assumption of modern navigation that surrounding traffic is broadcasting reliable, internally consistent data, and makes GPS spoofing detection significantly more difficult in real time.
The operational impact is already visible. Vessel movements across the region have been disrupted, with operators delaying or suspending transits through the Strait of Hormuz and, in some cases, holding position under sustained uncertainty. War-risk insurance withdrawals have compounded the situation, reducing available tonnage and driving charter rates sharply upward.
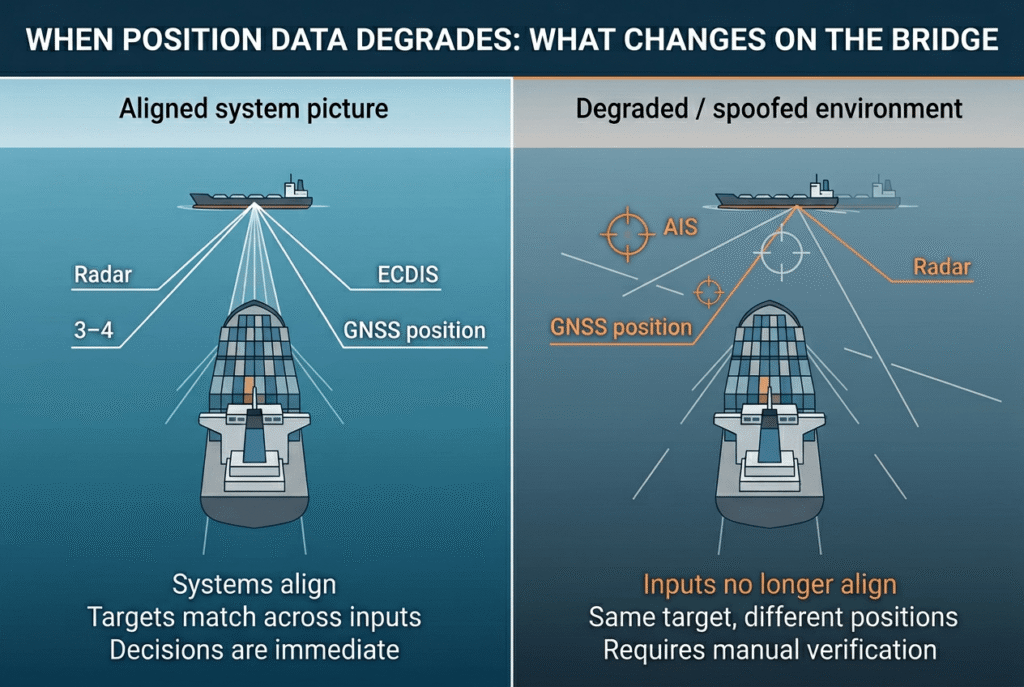
At a systems level, the result is a degradation of the shared digital picture that bridge teams rely on. AIS, GNSS, and radar inputs remain available, but no longer consistently align. The traffic environment becomes harder to interpret, creating what can be described as an “electronic fog” Similar interference patterns observed in the Baltic and Black Seas suggest this is not a regional anomaly, but an emerging operating condition in geopolitically sensitive waters.
When position data degrades due to GPS spoofing: what actually changes on the bridge?
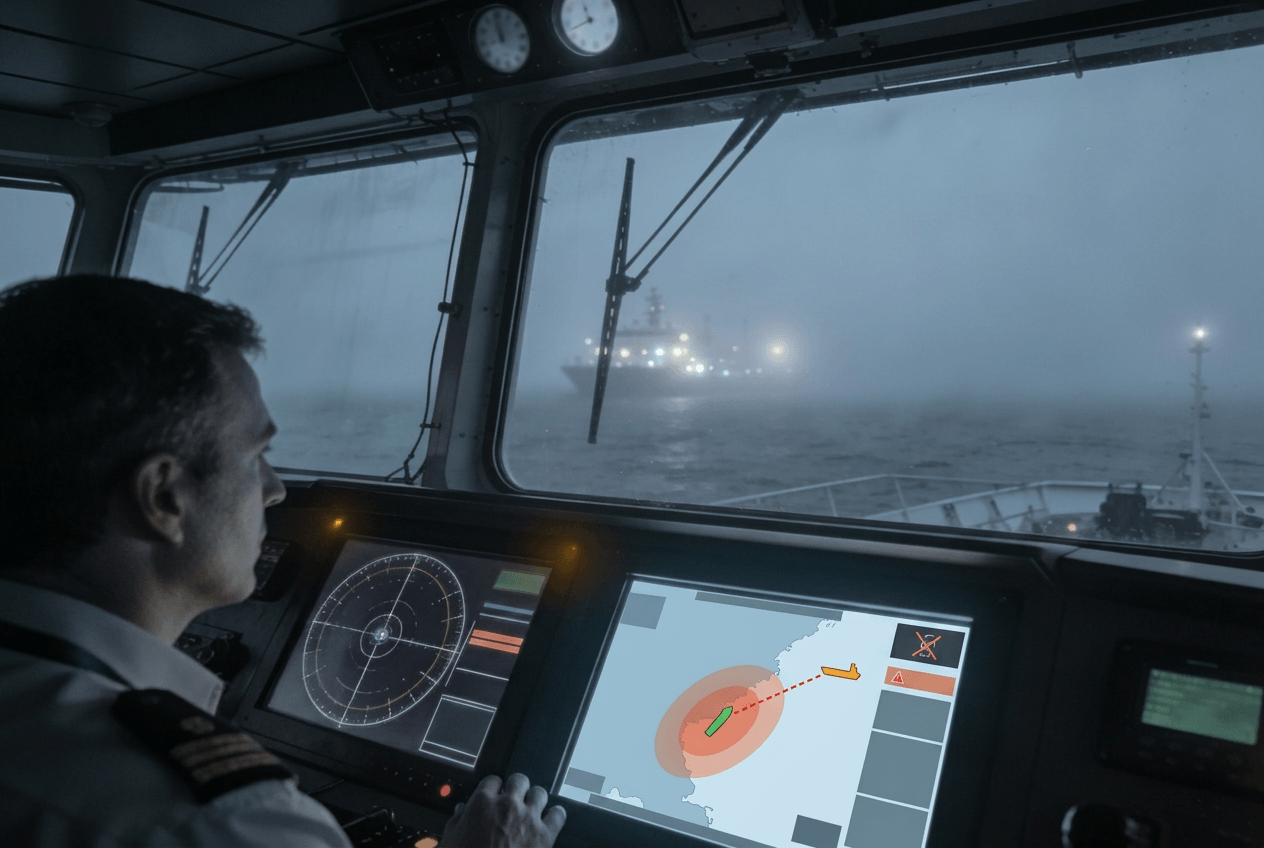
“Imagine you’re on board a 300, 400 metre ship and all of a sudden you’re losing all your navigation instruments — in the middle of the night.” That’s how Yarden Gross, CEO of Orca AI, describes the reality crews are now facing in affected waters. It captures something the technical framing of GNSS disruption often misses: this is not an abstract data quality problem. It is a situation where a vessel the size of several city blocks is moving through busy traffic with severely degraded awareness of what is around it.
Total signal loss is one version of this. When GNSS fails completely, it is at least recognisable — an alarm triggers, a procedure is followed, the crew knows what they are dealing with. The more insidious scenario is when the signal is still present but no longer reliable. Position jumps, timing inconsistencies, or AIS and radar overlays that don’t quite line up introduce doubt without triggering a clear failure. The systems continue to function, but the confidence behind them starts to erode.
On the bridge, that changes the nature of the work. It is no longer about operating systems as intended, but about continuously judging whether those systems reflect what is actually happening outside. The question shifts from what the situation is to which inputs can be trusted right now.
This becomes particularly evident in how systems stop aligning. GNSS is not just a positioning input, it underpins timing across multiple systems. When that timing drifts, even slightly, inconsistencies begin to appear. Targets may still appear across AIS, radar, and ECDIS, but their positions, movements, or identities no longer fully match. Nothing is obviously wrong, but nothing fully agrees either.
The critical risk this creates is not the effort required to resolve those discrepancies but the possibility of missing a target entirely. When electronic inputs are unreliable, physical observation becomes the primary check — but in fog, at night, or in poor weather, visibility can drop to zero. A vessel that does not appear correctly in the electronic picture, or does not appear at all, may also not be visible to the eye. That is the condition in which a collision becomes possible: not because a system alarmed and was ignored, but because nothing alarmed, and the target was simply not there in any picture the crew could access.
In that environment, crews continue to use the same tools, but differently:
- Cross-checking becomes continuous — radar, AIS, and visual inputs are compared constantly, not periodically
- Visual lookout carries more weight — not because systems fail, but because they cannot always be trusted, and in conditions such as night or fog, where visibility can drop to zero, this becomes a significant challenge for the bridge team.
- Automated outputs are treated with caution — CPA and TCPA remain useful, but depend on unstable inputs
- Correlation breaks down — targets appear across systems, but require manual confirmation before acting
Increased workload as a safety factor
What changes most is the pace of decision-making. Situations that would normally be resolved quickly begin to slow down. A crossing assessment takes longer. A developing situation requires another look, another comparison, another confirmation.
| Normal conditions | Degraded GNSS conditions |
|---|---|
| Crossing assessments resolved quickly | Crossing assessments require repeated confirmation |
| System outputs (CPA/TCPA, AIS) trusted by default | Outputs used with caution, require validation |
| AIS and ECDIS align consistently | Inputs no longer fully align, require reconciliation |
| Cross-checking is periodic | Cross-checking becomes continuous |
| Visual lookout maintained alongside instruments | Visual lookout used to verify instrument data |
| Clear signal anomalies trigger action | Subtle inconsistencies require interpretation |
| Stable attention with defined tasks | Sustained attention across multiple uncertainties |
This is where the impact becomes less about systems and more about people, because while the added effort is not dramatic in any single moment, it is continuous. And over time, small uncertainties accumulate into sustained cognitive load.
For small bridge teams, workload increases in a sustained way. Attention must be held for longer, task sharing becomes limited, and capacity to respond to new developments is reduced.
That’s also why spoofing is difficult to deal with in practice. The RIN survey reflects this — mariners aren’t saying they don’t understand the problem, they’re saying it’s hard to pin down while you’re navigating. Interference isn’t clean or obvious. It comes and goes, it doesn’t always trigger alarms, and it sits just below the threshold where you can confidently call it out. Even where GPS spoofing software or monitoring tools are in place, identifying and confirming interference in real time remains a practical challenge under operational conditions.
Why maritime resilience requires more than redundant satellites against GPS spoofing
Much of the industry response to GNSS disruption has focused on redundancy. Hardened receivers, multi-constellation GNSS, alternative PNT sources, and improved monitoring are all necessary and valuable. These measures reduce the likelihood of total signal loss and improve awareness of interference conditions.
However, many of these solutions still rely on radio frequency signals that may be disrupted simultaneously. They do not fully address the challenge of detecting non-broadcasting or deceptive targets in real time, particularly in busy sea lanes where decision windows are short.
They also do not reduce the cognitive workload placed on bridge teams when data conflicts. In some cases, additional data sources can increase the volume of information that must be interpreted manually.
This is where an additional, independent sensing layer becomes relevant.
Beyond GNSS navigation: adding an independent visual reference
Situational awareness on the bridge is built on correlation. Radar returns, AIS targets, ECDIS positioning, and visual observation are not used in isolation — they are constantly checked against each other to confirm a coherent picture.
GNSS disruption does not remove those inputs, but it breaks their alignment. Position and timing inconsistencies propagate across systems, and correlation becomes unreliable. Targets may still be visible across radar, AIS, and chart data, but no longer match closely enough to support confident decisions without additional validation.
In that situation, the value of each sensor changes. Inputs derived from external signals become less reliable, while those based on direct observation carry more weight. Radar provides a physical reference, but does not always resolve identification or intent, particularly in dense or ambiguous traffic.
How navigation tasks change — and where Orca AI supports
| Task | Under degraded GNSS | Orca AI support |
|---|---|---|
| Position validation | GNSS position requires continuous verification | Flags positioning inconsistencies early |
| AIS interpretation | AIS targets may be missing or misleading | Detects physical targets independent of AIS |
| Cross-checking | Continuous manual comparison across inputs | Highlights discrepancies automatically |
| Traffic interpretation | Conflicting inputs slow understanding | Helps prioritise targets |
| Decision-making | More time spent confirming before acting | Reduces time needed to reach a usable picture |
Orca AI introduces a further reference based on observed reality. Using optical and thermal sensors, it detects and tracks targets independently of GNSS and AIS, building a picture from what is physically present rather than what is transmitted.
The effect is not additional information, but more reliable correlation. Instead of resolving discrepancies entirely through manual cross-checking, crews have an independent input that helps stabilise the picture and reduce ambiguity where it matters most.
How does Orca AI support navigation when GNSS and AIS can’t be trusted?
Detection of degraded positioning conditions
GNSS interference is not always clearly identifiable. Orca AI detects inconsistencies between positioning data and other onboard sensors, identifying when the vessel is operating in a degraded environment.
Once detected, a real-time alert is generated on the bridge and shared with shore teams through FleetView, allowing both the vessel and the office to respond earlier and adjust operations where needed.
Detection of non-broadcasting vessels
When AIS data is incomplete or manipulated, parts of the traffic picture may be missing. Orca AI SeaPod detects and classifies targets based on physical presence, without relying on AIS or GNSS inputs, maintaining situational awareness even when transmitted data cannot be trusted.
Alignment of situational awareness
A significant part of the workload under GNSS disruption comes from resolving conflicting inputs. Orca AI helps align visual detections with radar and AIS data, making it easier to identify which targets are consistent with observed conditions and reducing the time required to interpret the traffic situation.
Shared awareness across vessels and shore
Spoofing events rarely affect a single vessel. Through Co-Captain, spoofing alerts are shared with nearby Orca-equipped vessels operating on the same route, allowing them to anticipate disruption before entering affected areas.
At the same time, shore teams monitor these events across the fleet, building a clearer picture of affected zones and supporting operational decisions beyond a single vessel.
Conclusion: supporting crews in degraded navigation environments
GNSS disruption is becoming something crews have to work through as part of normal operations.
Navigation systems remain in use, but their outputs cannot always be taken as internally consistent. Position, timing, and traffic data may all be present, but not fully aligned — which changes how navigation is carried out. More time is spent verifying, reconciling, and confirming before acting. Over a watch, that effort accumulates and shifts the burden onto the bridge team.
In that context, resilience is not only about redundancy. It requires an additional reference point, one that does not depend on the same signals and can be used to confirm what is physically present when systems diverge.
Systems such as Orca AI introduce that layer in practice, providing a reference tied to observed reality rather than transmitted data to support how they are used when alignment breaks down.
FAQs
How should crews prepare before entering known GNSS interference zones?
Preparation is mostly procedural. Bridge teams should brief expected disruption, agree on cross-checking practices, and ensure radar and visual watchkeeping are prioritised. Early warnings, such as those provided through Orca AI’s Co-Captain, can give crews the opportunity to reroute where possible or add an additional watchkeeper for support before entering the affected area.
What role do shore teams play during GNSS disruption events?
Shore teams provide a broader operational picture across multiple vessels. Monitoring patterns helps identify affected areas earlier, coordinate responses, and support route or operational adjustments before conditions deteriorate. Tools such as Orca AI allow crews to receive live alerts when entering GPS spoofing zones and give shore teams visibility into both real-time and historical disruption patterns across routes.
Are GNSS disruptions typically short-lived or sustained?
Recent patterns show disruption can persist for extended periods and is often intermittent rather than continuous. This makes it harder to detect and requires crews to operate under uncertainty rather than waiting for a clear failure signal.
What is the main limitation of current detection tools during spoofing events?
Many detection capabilities, including GNSS integrity monitoring, onboard alerts, and AIS anomaly detection can indicate that something is wrong, but not always what can be trusted. The challenge is not just detecting interference, but maintaining a usable and coherent traffic picture while it is happening.
When should a vessel adjust route or speed due to GNSS disruption?
There is no single trigger. Decisions are based on how confident the bridge team is in the traffic picture. If position data cannot be validated, targets cannot be reliably tracked, or decision timelines are extending, reducing speed or adjusting route may be necessary to regain control of the situation.